Một Số Phương Pháp Thiết Kế Hệ Thống Sử Dụng RTOS
1. Giới thiệu chung về RTOS
RTOS (Real-Time Operating System) là một hệ điều hành thời gian thực được thiết kế để xử lý các tác vụ trong một khoảng thời gian xác định, đảm bảo sự phản hồi kịp thời cho các sự kiện xảy ra trong hệ thống nhúng. Việc sử dụng RTOS giúp đơn giản hóa quản lý đa nhiệm, xử lý ngắt, đồng bộ dữ liệu, và lập lịch tác vụ.
Đối với một hệ thống nhúng phức tạp, thiết kế dựa trên RTOS không chỉ giúp tăng khả năng phản hồi mà còn hỗ trợ việc mở rộng, bảo trì và tối ưu hóa hiệu năng hệ thống.
2. Các Phương Pháp Thiết Kế Hệ Thống Sử Dụng RTOS
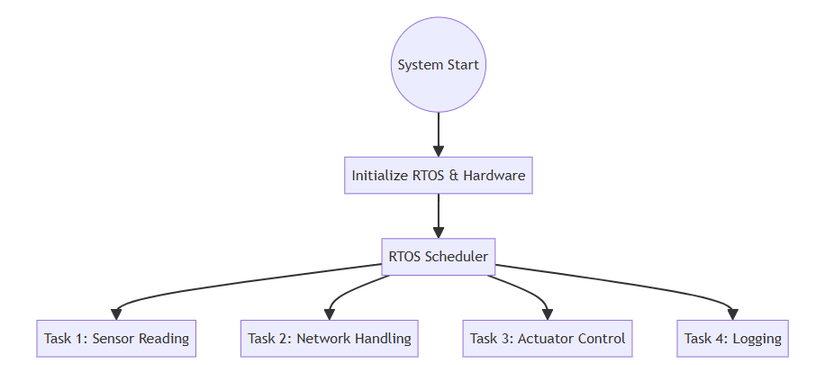
2.1. Thiết kế hướng nhiệm vụ (Task-Oriented Design)
Phương pháp này chia hệ thống thành các tác vụ (tasks) độc lập. Mỗi tác vụ sẽ phụ trách một chức năng riêng như:
- Giao tiếp UART
- Đọc cảm biến
- Giao tiếp mạng
- Điều khiển actuator
- Giao diện người dùng (UI)
Ưu điểm:
- Mã nguồn dễ tổ chức
- Mỗi phần được cách ly và dễ kiểm thử
- Tận dụng tốt khả năng lập lịch của RTOS
Nhược điểm:
- Dễ dẫn đến tranh chấp tài nguyên nếu không kiểm soát tốt (mutex, semaphore)
- Nếu có quá nhiều task nhỏ, hệ thống dễ bị phân mảnh thời gian CPU
2.2. Thiết kế hướng sự kiện (Event-Driven Design)
Ở đây, thay vì chia theo tác vụ độc lập, hệ thống được tổ chức để phản ứng theo các sự kiện cụ thể (tín hiệu từ cảm biến, dữ liệu từ mạng, timeout,...). Các task có thể chờ đợi trên các hàng đợi (Queue), thông báo (Notification), semaphore hoặc event group.
Ưu điểm:
- Tối ưu thời gian CPU
- Dễ dàng kiểm soát thứ tự xử lý các tình huống cụ thể
Nhược điểm:
- Cần kỹ thuật tốt để tránh rối logic xử lý sự kiện
- Phức tạp khi các sự kiện cần phối hợp nhiều tài nguyên
2.3. Thiết kế sử dụng FSM (Finite State Machine)
FSM (Máy trạng thái hữu hạn) dùng cho các ứng dụng có chu kỳ hoạt động lặp đi lặp lại và trạng thái rõ ràng như: trạng thái kết nối, trạng thái hoạt động, trạng thái lỗi…
Ví dụ:
- Kết nối Wi-Fi:
Disconnected → Connecting → Connected → Error - Điều khiển động cơ:
Idle → Running → Fault → Recovery
FSM thường được kết hợp với task hoặc event để tăng khả năng kiểm soát luồng xử lý.
2.4. Thiết kế sử dụng Layer Abstraction (Lớp trừu tượng hóa)
Thiết kế phần mềm theo lớp giúp phân chia rõ ràng:
- Lớp ứng dụng (Application Layer): Quyết định logic hệ thống
- Lớp xử lý trung gian (Middleware): Giao tiếp qua giao thức (MQTT, Modbus…)
- Lớp driver: Điều khiển phần cứng
Thiết kế theo lớp tăng khả năng tái sử dụng và dễ bảo trì.
2.5. Thiết kế hybrid (lai)
Kết hợp các phương pháp trên tùy thuộc vào yêu cầu hệ thống:
- Nhiệm vụ định kỳ như đọc cảm biến: Task định kỳ
- Giao tiếp UART: Event-driven + FIFO buffer
- Giao tiếp mạng: FSM kết hợp với event
3. Các Thành Phần Quan Trọng Khi Thiết Kế Trên RTOS
| Thành phần | Chức năng |
|---|---|
| Task | Thực thi chức năng chính |
| Queue | Trao đổi dữ liệu giữa task |
| Semaphore | Đồng bộ và khóa tài nguyên |
| Event Group | Phản ứng theo nhóm sự kiện |
| Timer | Kích hoạt hành động định kỳ hoặc delay |
| ISR (Interrupt Service Routine) | Phản hồi nhanh từ phần cứng |
4. Các Chiến Lược Tối Ưu Luồng Xử Lý Hệ Thống
4.1. Ưu tiên hợp lý cho Task
Phân loại task thành:
- High Priority: Xử lý thời gian thực (ngắt, lấy mẫu ADC…)
- Medium Priority: Giao tiếp UART, xử lý dữ liệu
- Low Priority: Ghi log, hiển thị
Quy tắc: Task có thời gian xử lý ngắn và cần phản ứng nhanh nên có ưu tiên cao.
4.2. Sử dụng Task Notification thay vì Queue nếu có thể
xTaskNotify() nhanh hơn và tiêu tốn ít tài nguyên hơn xQueueSend(), phù hợp cho trao đổi dữ liệu nhỏ hoặc tín hiệu.
4.3. Hạn chế block trong callback và ISR
Trong ISR hoặc callback timer, không nên gọi hàm blocking hoặc delay. Thay vào đó, nên gửi tín hiệu cho một task có độ ưu tiên phù hợp.
void vTimerCallback(TimerHandle_t xTimer)
{
// Không xử lý chậm ở đây
xTaskNotifyFromISR(xHandlerTask, 0, eNoAction, NULL);
}
4.4. Tránh tạo quá nhiều Task
Hệ thống nên có số lượng task vừa đủ. Nếu một nhóm task cùng độ ưu tiên, hoạt động không song song, có thể gộp thành một task duy nhất + FSM.
4.5. Sử dụng Tickless Idle nếu hệ thống thường xuyên rảnh
Tickless Idle là kỹ thuật tắt timer hệ thống khi không có task sẵn sàng, giúp tiết kiệm điện năng trên thiết bị IoT hoặc thiết bị dùng pin.
4.6. Dùng DMA (Direct Memory Access)
Thay vì xử lý dữ liệu trong CPU, dùng DMA để tự động truyền nhận dữ liệu, giúp giảm tải CPU đáng kể, đặc biệt với giao tiếp UART, SPI, ADC, DAC…
4.7. Tối ưu phân phối tài nguyên: Heap và Stack
- Sử dụng
uxTaskGetStackHighWaterMark()để kiểm tra mức stack sử dụng - Dùng heap_4 hoặc heap_5 để quản lý bộ nhớ tốt hơn trên hệ thống phức tạp
- Tránh cấp phát bộ nhớ động quá nhiều trong runtime
4.8. Kiểm soát ngắt:
- Không xử lý logic phức tạp trong ISR
- ISR nên “gửi tín hiệu” cho task thay vì thực thi logic
- Ngắt nên được ưu tiên hợp lý và không lặp lại thường xuyên nếu không cần
4.9. Monitor và profiling hệ thống
Sử dụng vTaskGetRunTimeStats() hoặc tích hợp công cụ như:
- FreeRTOS+Trace
- Percepio Tracealyzer
- Segger SystemView
Để xác định bottleneck, thời gian CPU sử dụng và các vấn đề tiềm ẩn.
5. Kết luận
Thiết kế hệ thống sử dụng RTOS là một công việc đòi hỏi sự cân bằng giữa tính modular, khả năng mở rộng, và hiệu năng thực thi. Việc lựa chọn phương pháp thiết kế (task-based, event-driven, FSM…) tùy thuộc vào đặc điểm và yêu cầu hệ thống. Để hệ thống hoạt động hiệu quả, người thiết kế cần có các chiến lược tối ưu luồng xử lý như: thiết kế task hợp lý, tránh block, sử dụng DMA, phân tích luồng hoạt động để loại bỏ nút thắt.
Bằng cách áp dụng các phương pháp thiết kế và tối ưu như trên, bạn có thể xây dựng một hệ thống nhúng mạnh mẽ, đáng tin cậy, tiết kiệm tài nguyên và đáp ứng tốt yêu cầu thời gian thực.
All rights reserved
